ロボットの動かし方(モーションコンテンツ)
ロボット(特にエンタテインメントロボット)を動かすときの基本的な考え方として知っておくべきなのは、『ポーズ』と『モーション』です。これはいわゆる産業用ロボットには必要のない概念です。なぜなら産業用ロボットは手先を正確な位置に動かし、ものをつかんだり持ち上げたりするのが仕事であり、骨格がどういう形をしているかなどは関係ないからです。しかしエンタテインメントロボットに関していえば、骨格がどういう形をしているかが一番大事なことで、手先の位置が多少ずれてもあまり問題がないことが多いです。まずこの違いを理解しないと話がかみ合わなくなってしまいます。
人が他の人とコミュニケーションを取るために体を動かす場合を考えてみてください。手を振って挨拶したり、会釈したりいろいろな場合がありますが、大事なのは自分の気持ちをどう相手に伝えるかです。もちろん何か作業する場合もありますが、多くの場合は自身の感情を伝えるために身振り手振りをしていると思います。そういう動作をロボットにさせるとき、大事なのが『ポーズ』と『モーション』です。
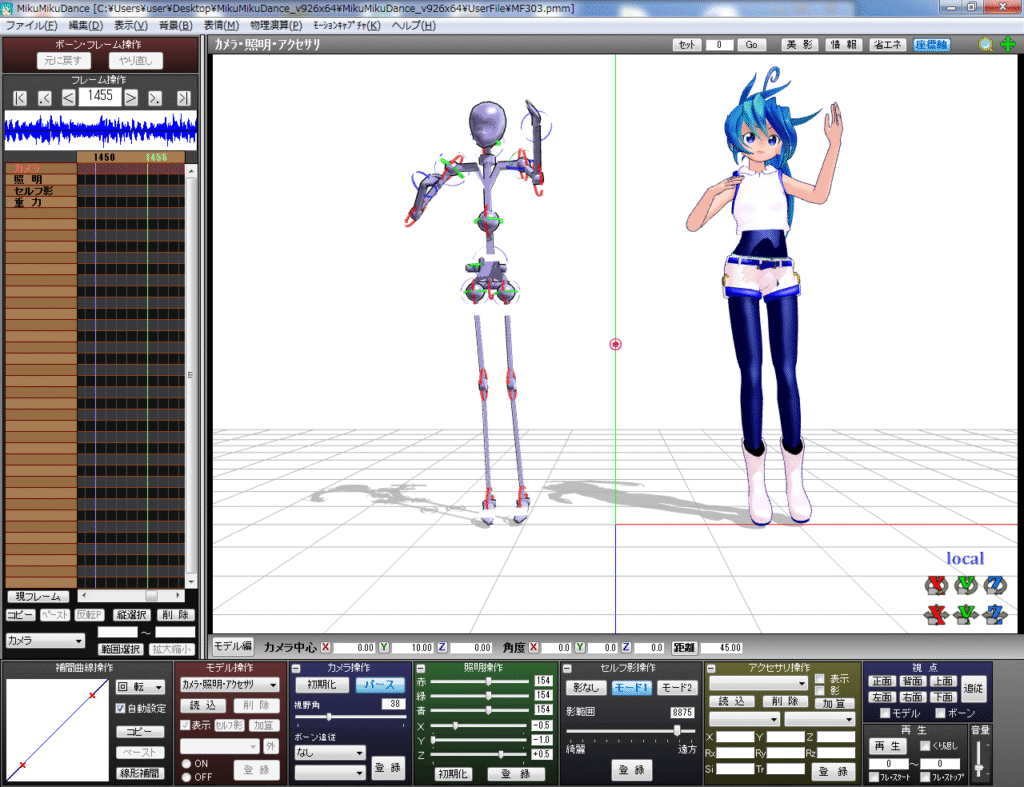
『ポーズ』はロボットの骨格の形を表すもので、動かない固定された形です。一方、『モーション』は多くのポーズが連続して連なって一連の動きを表します。手を振る動作など考えていただければ、どんなポーズが連なって一連のモーションになるか想像できると思います。
『一連の』と書くと、モーションを作るのはものすごく沢山のポーズを組み合わせないといけないのではないかと思われるかもしれませんが、例えば手を振る動作を考えると、手が右にあるポーズと手が左にあるポーズを2つ作れば、その間のポーズはシステムが補完してくれます。ですので、あまり大変ではありません。キーになるポーズ(キーフレームといいます。)を決めて作っていき、その間の動きはシステムに補完してもらえばよいのです。
When operating robots (especially entertainment robots), it is important to understand the basic concepts of “Pose” and “Motion” These concepts are not necessary for industrial robots. This is because industrial robots are designed to move their hands to precise positions and perform tasks such as grasping and lifting objects, and the shape of their skeletons is irrelevant. However, when it comes to entertainment robots, the shape of the skeleton is the most important factor, and even if the position of the limbs is slightly off, it often isn’t a big deal. Without understanding this difference, your understandings won’t make sense.
Consider how people move their bodies to communicate with others. There are various ways to do this, such as waving your hand to greet someone or bowing, but the important thing is how to convey your feelings to the other person. Of course, there are times when you are doing something practical, but in most cases, I think people use gestures to convey their emotions. When making a robot perform such movements, the important things are “poses” and “motions.”
A “Pose” refers to the shape of a robot’s skeleton, which is a fixed shape that does not move. On the other hand, “Motion” refers to a series of movements consisting of a sequence of poses. If you think about the action of waving your hand, for example, you can imagine what poses would be needed to create a series of motions.
When you see the phrase “a series of,” you may think that creating a motion requires combining a huge number of poses, but if you consider the action of waving your hand, for example, you only need to create two poses, one with your hand on the right and one with your hand on the left, and the system will fill in the poses in between. So, it’s not that difficult. You just need to decide on the Key Poses (called KeyFrames) and create them, and the system will fill in the movements in between.






コメント
コメント一覧 (2件)
I enjoy the efforts you have put in this, appreciate it for all the great posts.
Very interesting information!Perfect just what I was looking for! “The most wasted day of all is that on which we have not laughed.” by Sbastien-Roch Nicolas de Chamfort.