kasuga397– Author –
-

The structure of servo motors for hobby
ホビー用サーボモーターの構造や動かし方を知るには下記のサイトが役に立つと思います。産業用のサーボモーターや等身大人型ロボット用のサーボモーターも基本的には同じ様な構造です。 ホビー用サーボモーター(アナログ式)Servo motors for hobby (anal... -
The structure of a hobby biped robot
ロボットの構造をホビー用2足歩行ロボットで考えてみましょう。このサイトが参考になると思います。長い間ベストセラーのKONDO社のロボットキットです。組み立てマニュアルをダウンロードしてみてみてください。これを見るとロボットの部品体積のほとんど... -
Comparison of Robot Axis Movement and Human Joints
ロボットの腕の動きを考える時、このビデオが参考になると思います。 I think this video will be helpful when considering the movement of the robot's arms. -
Why designing a robot is difficult? (Hardware1)
ロボットの設計は何が難しいのでしょう?何回かに分けてお話ししたいと思いますが、第一回目としてハードウェアについてです。ロボットのハードウェアの設計が難しい原因を整理すると下記のようになると思います。(1)人間の関節は複雑で同じような機構... -
Reached 300 Comments!
300コメントに達しました。ありがとうございます。 We have reached 300 comments. Thank you very much. -
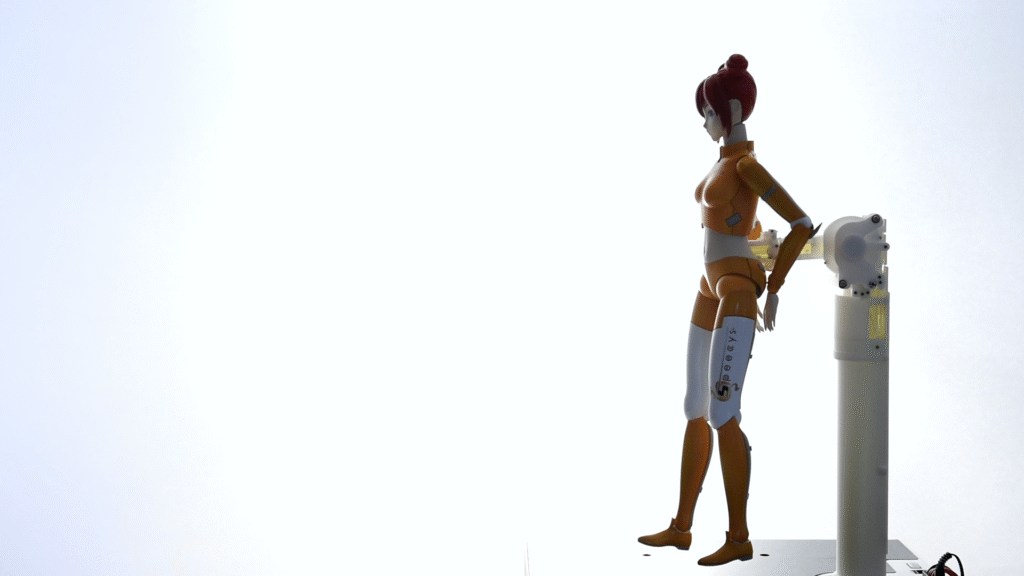
45cm Robot Figure : MOFI7-Pro
Feb. 2017 45cmロボットフィギュアー:MOFI7-Pro を発表しました。今までで最多の33関節を備え、多軸動作が可能な丸い関節とボディーを支えて上下左右に動かせるステーも相まって、滑らかな動きを実現しています。CPUにはラズベリーパイ3を使用し、OSに... -
Robot Figure 4th Prototype (MF-401)
Dec. 2015 60cm Robot Figure MF-401 ドール自体はボークスのドールとコンパチです。スキンと服はボークス製。きれいなスキンを使えるように骨格をデザインし、関節を丸くしてより複雑に滑らかに動かすことに注力しました。例えば膝の関節を見ていた... -
Robot Figure 3rd Prototype (MF-303)
Feb. 2015 28自由度のモーションフィギュア:OSにはLINUXを搭載し、MikuMikuDanceでモーション作成可能。ステーで体を支えているので、ボディーの自由度が高い。 Robot Figure with 28 degrees of freedom OS is equipped with LINUX and motion can b... -
Robot Figure 2nd Prototype (MF-201)
July 2014 2nd prototype can move arms, waist, heads, legs, etc. But it is one-leg-fixed-to-the-base type. So the freedom is not so good. We need to improve it next time. -
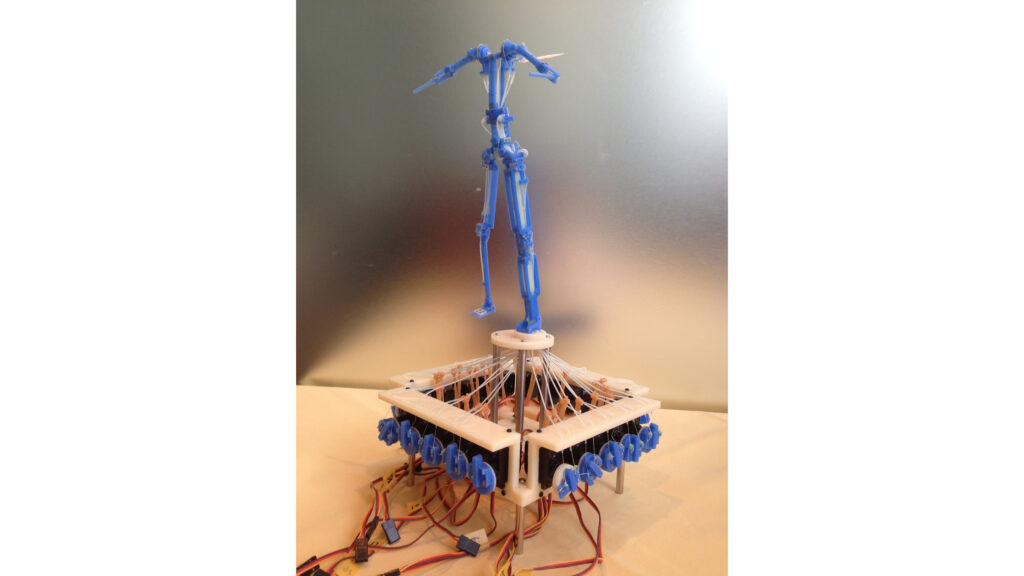
Robot Figure First Prototype (MF-105N)
May. 2014 So I thought about how to make a slim and quiet robot. The reason why a robot becomes fat and noisy is because a large servo motor is placed at the joints, which makes the joints fat, and the motors and gears make loud noises...