記事一覧
-

Why Bipedal Robots Are So Fascinating?
2足歩行ロボットが魅力的な理由 私達は表現力の多彩なロボットを目指しています。多数のAIBOによるミュージカルも経験しましたし、2足型のロボットも開発してみましたが、その結果わかったのは2足型のロボットの表現力は素晴らしいという事で... -
Designing bones for MikuMikuDance
MMDのボーンを設計する MMDをロボット用のモーションクリエーションツールとして使う上で、最初にしなくてはならないのがボーンの設計です。ボーンの設計をマクロに考えると、関節の構造と骨の長さになります。関節の構造設計はどの部分がどのように... -
Talent is required to create robot content.
ロボットのコンテンツ制作には才能が必要 産業用ロボットではなくエンタテインメントロボットの場合は、ロボットがどういうポーズやモーションをするかがとても大事です。なぜなら正確な動かし方をするのではなく、より感情が伝わる動かし方をするべ... -
Why designing a robot is difficult? (Hardware2)
骨格と外装(Skelton and Skin)によるロボット構造の必要性 私たちは、AIとインターネットの時代には人にフレンドリーなロボットが必要だと思っています。それを考えると外観は自分の好みのキャラクターなどに近づけたくなりますよね?しかも皆さん... -
How to move robots (Motion Contents)
ロボットの動かし方(モーションコンテンツ) ロボット(特にエンタテインメントロボット)を動かすときの基本的な考え方として知っておくべきなのは、『ポーズ』と『モーション』です。これはいわゆる産業用ロボットには必要のない概念です。なぜな... -
Types of servo motors
サーボモーターの種類 一般的にロボットに使われるサーボモーターには2種類あります。PWMサーボとコマンドサーボです。 PWMサーボは、PWM信号というアナログ信号のパルス幅に合わせて角度が変わるサーボで、アナログサーボといっても良いかもしれま... -
Wouldn’t you like to have a robot like this?
こんなロボットが欲しくないですか?世界中の街で自分の分身として動いてくれるロボットがレンタルできて、そのロボットをレンタルすると自分の家からそのロボットをインターネット経由で操縦できて、どこへでも私の代わりに出かけてくれるロボット。 ロボ... -
What does it mean to move robot’s body?
ロボットの体を動かすとはどういうことか?私たち人間は何も考えなくても自然に体を動かせますが、ロボットの体を動かすとはどういうことか考えてみましょう。 何かを目で見つけて、それに興味がわき、もっとよく見ようと思い、近づいていく場合を考えてみ... -
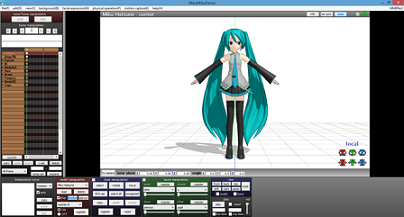
How to use MikuMikuDance(MMD)
3D アニメーション制作ツール:MikuMikuDance を使えば、ロボットの各関節の角度データをPCで画面上で制作することができます。その概要やインストール方法はこちらから。3D Animation Design Tool: MikuMikuDance for an overview and installation instr... -
How to move a robot (Multi Servo Control)
MF303 + MikuMikuDance(3D Animation design tool) 多くのサーボを同時に動かして、ロボットの動かす方法についてです。ロボットには少なく考えても20個(多いと40個)ほどのサーボモーターが使われています。それほど多くのモーターをどうやって動かせ...